Raspberry Pico Development board
Date: 12/2022
Revision: 1
Raspberry Pico Development Board
Introduction
The Raspberry Pico is a powerful and inexpensive microcontroller that can be used for a variety of projects. However, the Raspberry Pi Foundation prioritized factors of size, efficiency, and cost when creating the board. This leaves certain drawbacks of the microcontroller that are well documented in the Pico datasheet 15. In this project, I aim to solve a few minor inconveniences of the Pico’s design and create a development board better suited to approaching projects. Fixes include a reset button, an off switch for the onboard SMPS, LDO voltage regulators, and better ADC performance. Additionally, Parallel 16x2 LCD display, two 10-bit DAC channels, and SD card R/W capability are added to allow the development board to act as a drop in test bench for relaying or saving information.
Methods
See also
This device focuses on ADCs, DACs, and displays to streamline development of a project. Concepts and components from the pages below are employed. Topics that required greater detail for clarification are revisited.
ADC Configuration
Since the ADC in on the Raspberry Pico, initial setup of the ADC can easily be achieved using the ADC section of the Pico Software Development Kit (SDK) 14. This provides the engineer with a simple and straightforward introduction on taking ADC readings. However, the 12-bit ADC onboard the Pico is not great by any means. This is due to the switching power regulator on the Pico. As a result of switching signal noise, the onboard voltage reference for the ADC is setup in poor conditions. The ADC has a 30mV offset and its signal is quite noisy 13. The datasheet gives suggestions on improvement of the ADC readings. An External reference voltage may be used, the R7 resistor can be removed, or issues can be mitigated in averaging and offset code. I chose a different route entirely, by adding bypass capacitors to the reference voltage and ADC input pins for filtering and smoothing.
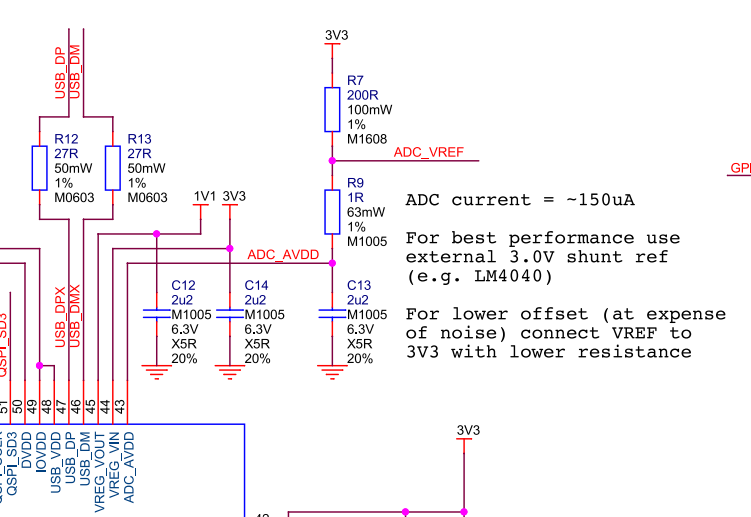
The Approach taken in this circuit was to provide an external power source and bypass the SMPS entirely. By incorporating a series of LDO’s we are able to create 5V and 3.3V rails with minimal noise. Driving the Pico via a 3.3V LDO feeds the ADC reference through a lowpass filter onboard. This creates a significant improvement from ADC SMPS measurements. However, since the entire Pico is supplied through the LDO 3.3V rail, voltage spikes and drops may occur from computations occurring on the device. This could be further mitigated by exclusively feeding the Pico’s ADC reference with a 3.3V LDO and removing the R7 resistor on the device. This would disconnect the internal 3.3V rail from the ADC reference entirely.
Power Regulation and Filtering
To supply power to the system, I chose to use the LDL1117 5V and 3.3V low-dropout regulators. This allows for a 9-12V DC source to supply the devices without much overhead. This provided a smooth 5V and 3.3V source for most components, with local decoupling capacitors where needed.
In addition to the 5V source, I powered the Raspberry Pico via the VSYS node to activate the device and use the 3.3V Switching Mode Power Supply (SMPS). This was done using a Schottky diode from 5V to VSYS to avoid backflow when the Pico is plugged in via USB 13. The Pico power-chain is good because the SMPS is efficient, but noise on the output causes problems with other systems like the ADC 13, 14. As a result, I byapassed the SMPS entirely by incorporating a shutoff switch for the SMPS.
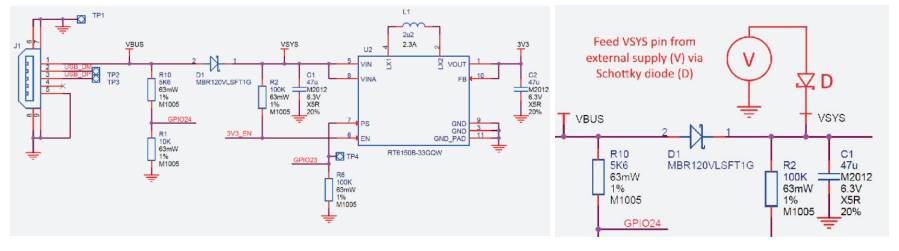
Figure 18: Pico Power-chain and the implemented method of external supply [8]_.
SD Card Reader
An SD card reader has been added via SPI 16. This permits the user to incorporate data collection over time via sensors and ADC readings. These data readings can be written to text or csv files on a SD card for post test analysis.
Inputs and Outputs
A physical reset button was added to the development board to interrupt the RUN pin on the Pico. When this pin is connected to ground, the device will shut off. To insure proper reset, hold the reset button for 3 seconds. This will guarantee that the Pico has been discharged. The Pico has a full array of female headers for easy pinout access and another for seating the pico onboard. Pinout names have been added to the silkscreen simplify development.
Schematic and PCB Design
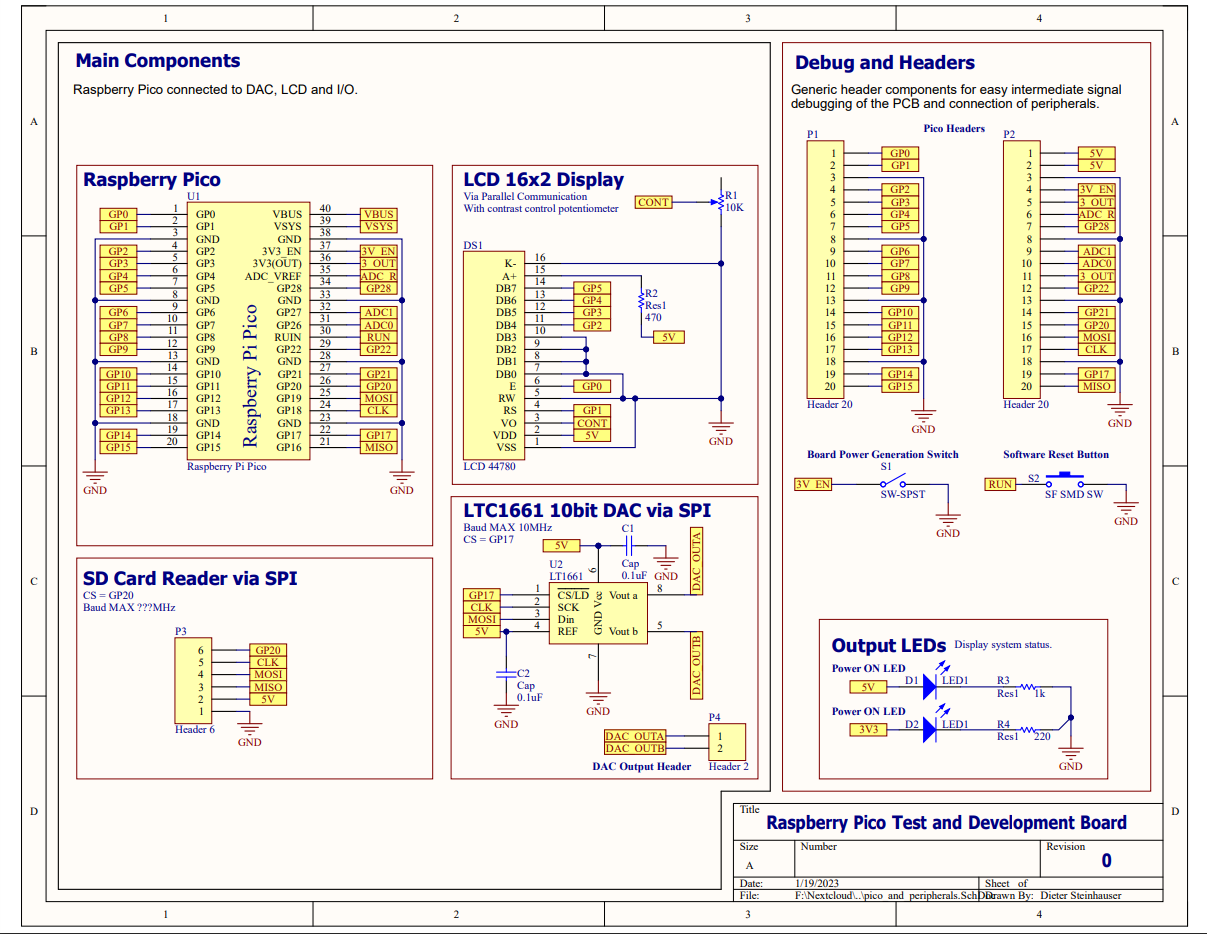
Figure 22: Devboard schematic page 1 of 2.
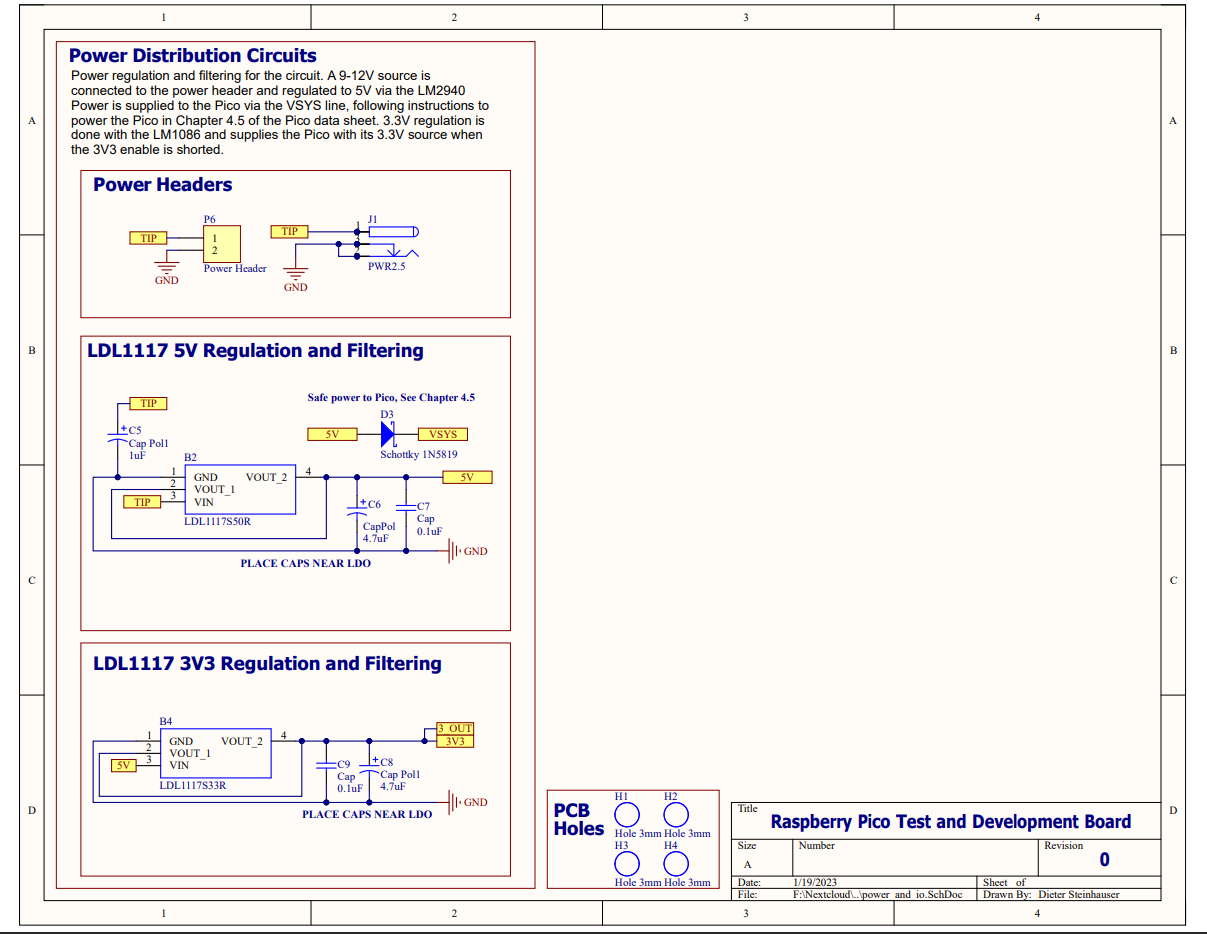
Figure 23: Devboard schematic page 2 of 2.
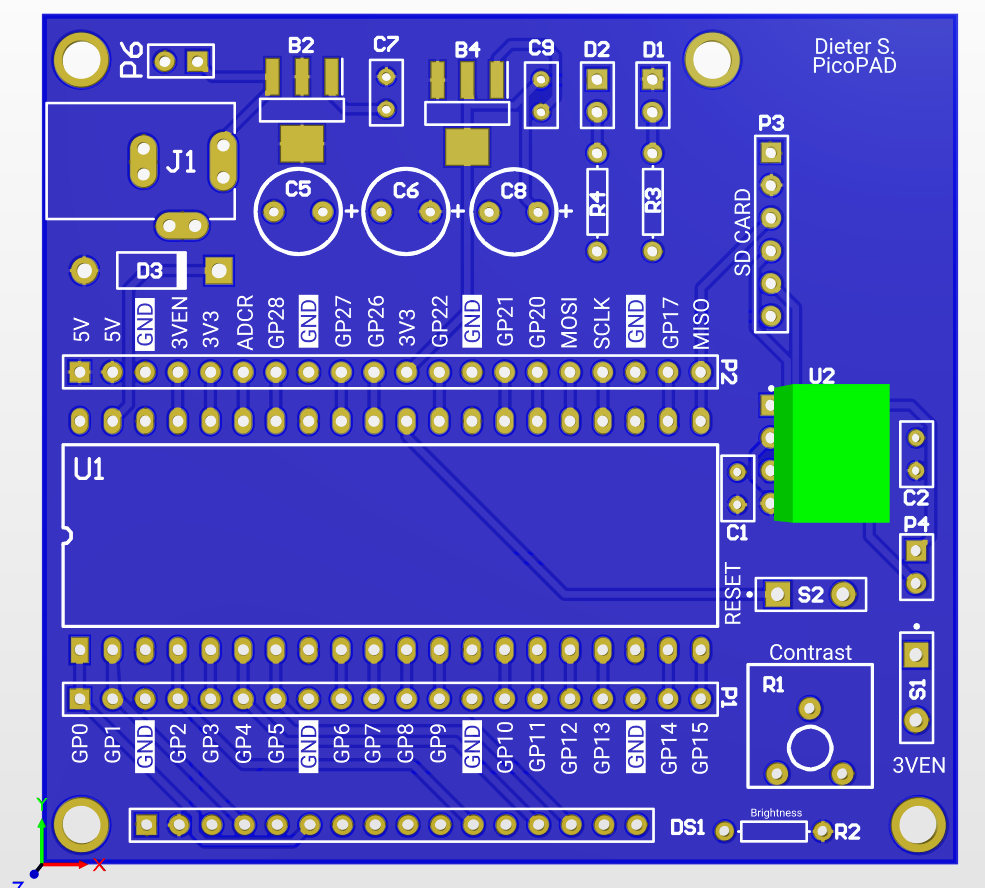
Figure 24: Top side of Devboard PCB layout.
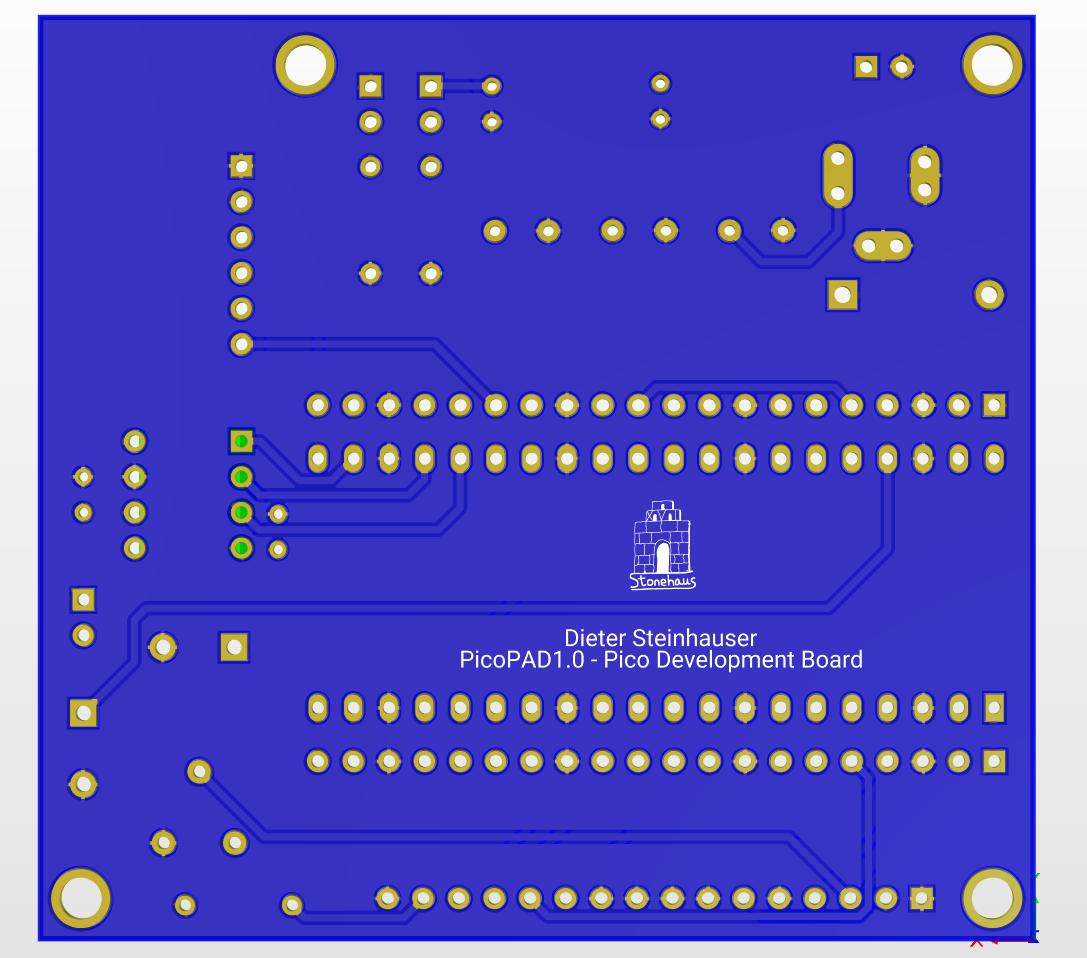
Figure 24: Bottom side of Devboard PCB layout.
Bill Of Materials
Results
The schematic of the circuit and PCB turned out well, with minimal errors. The assembled PCB was easy to debug because of its plentiful headers employed in the diagram. Also, using female headers for the ultrasonic sensors, LCD, DIP packages, and potentiometers aided debug and ensured that any errors in design could be more easily fixed if the PCB was routed wrong. Thankfully, there were no design breaking errors in this circuit, and most components worked immediately after installation.
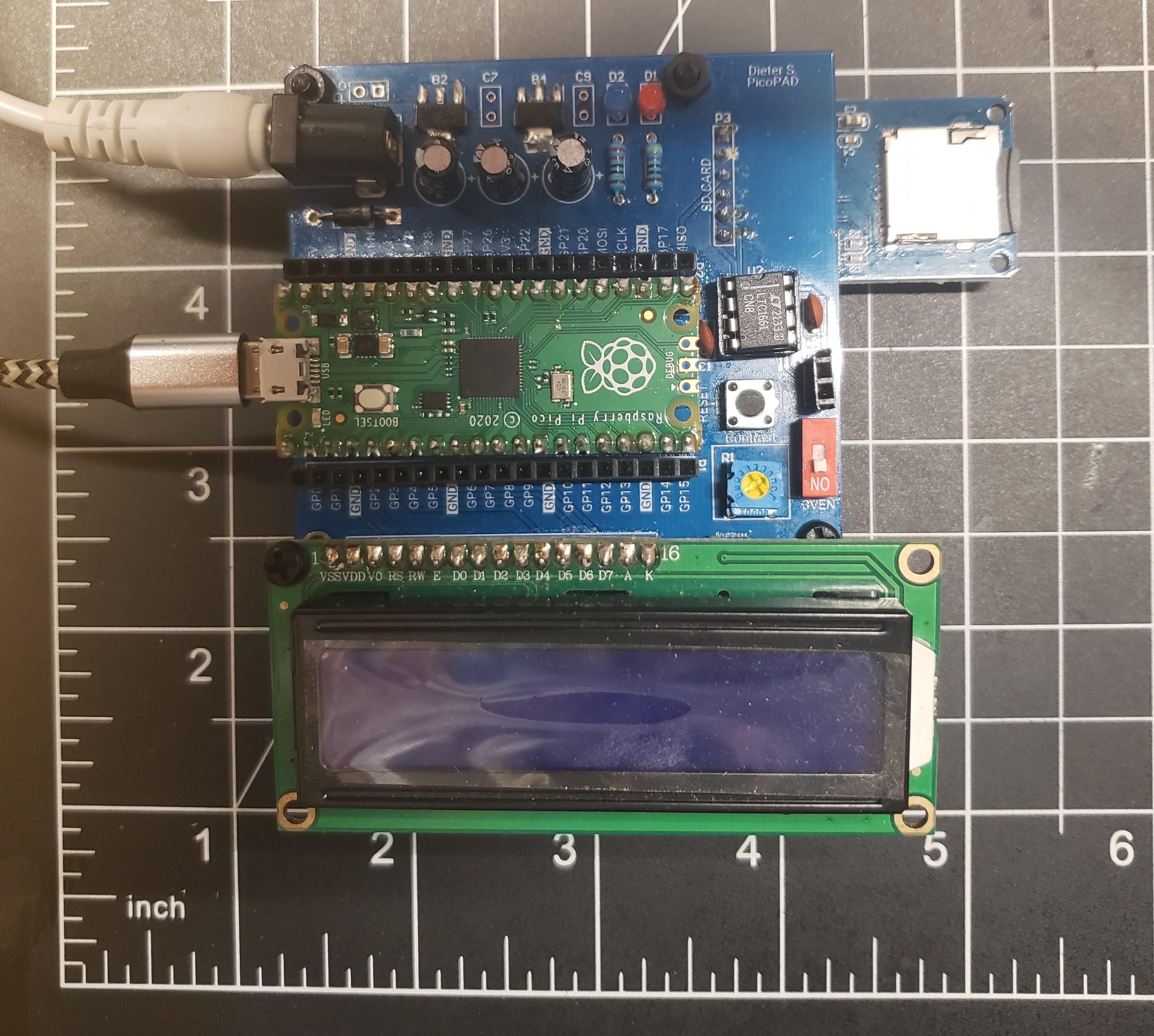
Figure 42: Raspberry Pico Development Board
Power
The power regulation and filtering produced a 5V and 3.3V source with minimal noise, observed with as little as 10mV ripple on both sources.
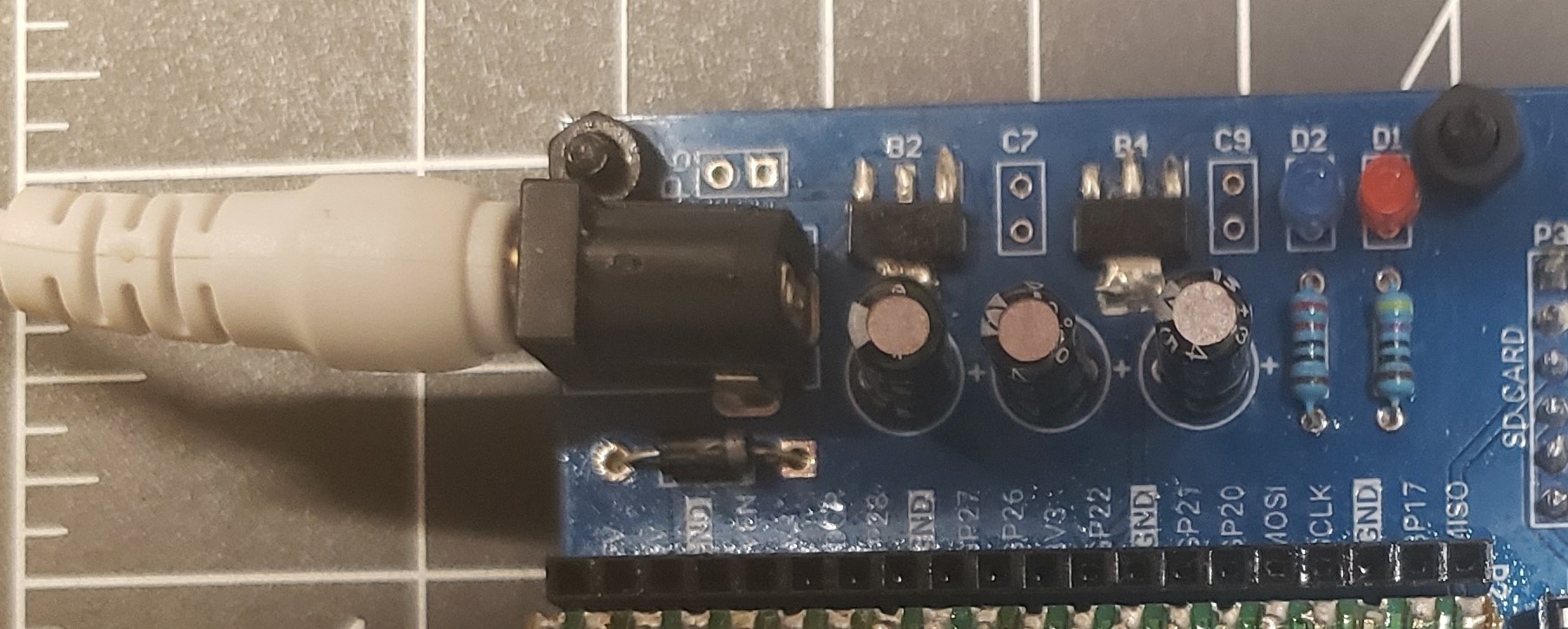
Figure 27: Power regulation system on the PCB
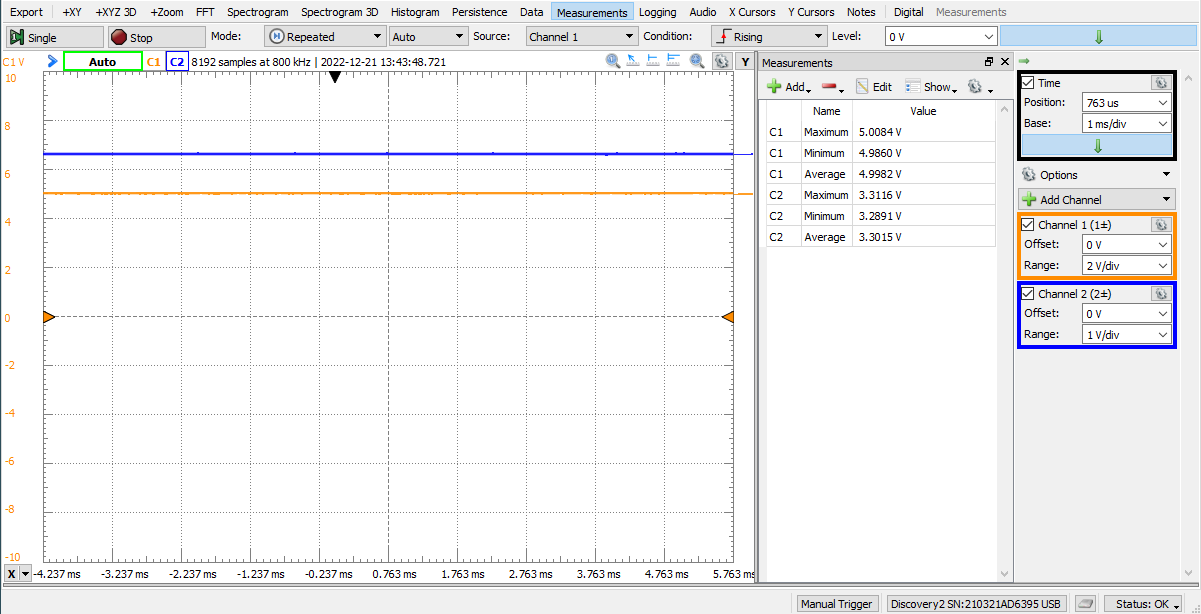
Figure 28: 5V and 3.3V source observed on the oscilloscope.
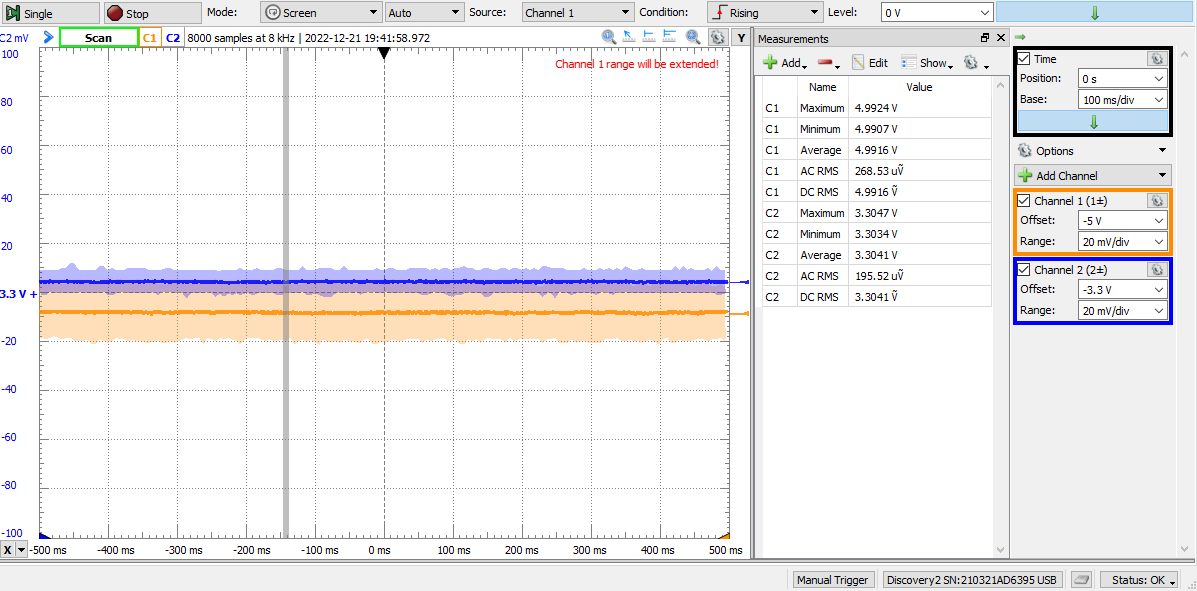
Figure 29: 5V and 3.3V source observed on the oscilloscope, both from a 20mV div.
Appendix
LCD.py
1# ----------------------------------------- 2# NOTES 3# ----------------------------------------- 4""" 5Dieter Steinhauser 65/2023 7Parallel LCD functions, Configured for 4-bit communication. 8""" 9 10# ----------------------------------------- 11# IMPORTS 12# ----------------------------------------- 13 14from machine import Pin 15import utime 16 17# ----------------------------------------- 18# CONSTANTS AND VARIABLES 19# ----------------------------------------- 20 21# CONSTANTS 22# ---------------------- 23 24LCD_CMD = 0 25LCD_DATA = 1 26 27# ---------------------- 28# GPIO Wiring: Legacy Structure 29# ---------------------- 30 31# EN = Pin(0, Pin.OUT) # Enable Pin 32# RS = Pin(1, Pin.OUT) # Register Select 33 34# PINS = [2, 3, 4, 5] 35# Pin numbers for the upper nibble, does the below assignment in configure method. 36# D4 = Pin(2, Pin.OUT) 37# D5 = Pin(3, Pin.OUT) 38# D6 = Pin(4, Pin.OUT) 39# D7 = Pin(5, Pin.OUT) 40 41# list that gets populated with pinout objects for data line. 42# DATA_BUS = [] 43 44# ----------------------------------------- 45# METHODS 46# ----------------------------------------- 47 48# def Configure(): 49# """Creates the data bus object from the pin list""" 50 51# for index in range(4): 52# DATA_BUS.append(Pin(PINS[index], Pin.OUT)) 53 54# # ----------------------------------------- 55 56# def lcd_strobe(): 57# """Flashes the enable line and provides wait period.""" 58 59# EN.value(1) 60# utime.sleep_ms(1) 61 62# EN.value(0) 63# utime.sleep_ms(1) 64 65# # ----------------------------------------- 66 67# def lcd_write(command, mode): 68# """Sends data to the LCD module. """ 69 70# # determine if writing a command or data 71# data = command if mode == 0 else ord(command) 72 73# # need upper nibble for first loop. lower nibble can use data directly. 74# upper = data >> 4 75 76# # write the upper nibble 77# for index in range(4): 78# bit = upper & 1 79# DATA_BUS[index].value(bit) 80# upper = upper >> 1 81 82# # strobe the LCD, sending the nibble 83# RS.value(mode) 84# lcd_strobe() 85 86# # write the lower nibble 87# for index in range(4): 88# bit = data & 1 89# DATA_BUS[index].value(bit) 90# data = data >> 1 91 92# # Strobe the LCD, sending the nibble 93# RS.value(mode) 94# lcd_strobe() 95# utime.sleep_ms(1) 96# RS.value(1) 97 98# # ----------------------------------------- 99 100# def lcd_clear(): 101# """Clear the LCD Screen.""" 102 103# lcd_write(0x01, 0) 104# utime.sleep_ms(5) 105 106# # ----------------------------------------- 107 108# def lcd_home(): 109# """Return the Cursor to the starting position.""" 110 111# lcd_write(0x02, 0) 112# utime.sleep_ms(5) 113 114# # ----------------------------------------- 115 116 117# def lcd_cursor_blink(): 118# """Have the cursor start blinking.""" 119 120# lcd_write(0x0D, 0) 121# utime.sleep_ms(1) 122 123# # ----------------------------------------- 124 125# def lcd_cursor_on(): 126# """Have the cursor on, Good for debugging.""" 127 128# lcd_write(0x0E, 0) 129# utime.sleep_ms(1) 130 131# # ----------------------------------------- 132 133# def lcd_cursor_off(): 134# """Turn the cursor off.""" 135 136# lcd_write(0x0C, 0) 137# utime.sleep_ms(1) 138 139# # ----------------------------------------- 140 141# def lcd_puts(string): 142# """Write a string on to the LCD.""" 143 144# for element in string: 145# lcd_putch(element) 146 147# # ----------------------------------------- 148 149# def lcd_putch(c): 150# """Write a character on to the LCD.""" 151# lcd_write(c, 1) 152 153# # ----------------------------------------- 154 155# def lcd_goto(column, row): 156 157 158# if row == 0: 159# address = 0 160 161# if row == 1: 162# address = 0x40 163 164# if row == 2: 165# address = 0x14 166 167# if row == 3: 168# address = 0x54 169 170# address = address + column 171# lcd_write(0x80 | address, 0) 172 173# # ----------------------------------------- 174 175# def lcd_init(): 176 177# # Configure the pins of the device. 178# Configure() 179# utime.sleep_ms(120) 180 181# # clear values on data bus. 182# for index in range(4): 183# DATA_BUS[index].value(0) 184# utime.sleep_ms(50) 185 186# # initialization sequence. 187# DATA_BUS[0].value(1) 188# DATA_BUS[1].value(1) 189# lcd_strobe() 190# utime.sleep_ms(10) 191 192# lcd_strobe() 193# utime.sleep_ms(10) 194 195# lcd_strobe() 196# utime.sleep_ms(10) 197 198# DATA_BUS[0].value(0) 199# lcd_strobe() 200# utime.sleep_ms(5) 201 202# lcd_write(0x28, 0) 203# utime.sleep_ms(1) 204 205# lcd_write(0x08, 0) 206# utime.sleep_ms(1) 207 208# lcd_write(0x01, 0) 209# utime.sleep_ms(10) 210 211# lcd_write(0x06, 0) 212# utime.sleep_ms(5) 213 214# lcd_write(0x0C, 0) 215# utime.sleep_ms(10) 216 217 218# ----------------------------------------- 219# LCD Class: 220# ----------------------------------------- 221 222 223class LCD: 224 """The LCD class is meant to abstract the LCD driver further and streamline development.""" 225 226 CMD_MODE = 0 227 DATA_MODE = 1 228 229 def __init__(self, enable_pin: int, reg_select_pin: int, data_pins: list) -> None: 230 """Object initialization""" 231 232 self.enable_pin = Pin(enable_pin, Pin.OUT) 233 self.reg_select_pin = Pin(reg_select_pin, Pin.OUT) 234 self._data_pins = data_pins 235 self.data_bus = [] 236 237 # Configure the pins of the device. 238 self._configure() 239 utime.sleep_ms(120) 240 241 # ----------------------------------------- 242 243 def _configure(self): 244 """Creates the data bus object from the pin list. """ 245 246 # Configure the pins of the device. 247 for element in self._data_pins: 248 self.data_bus.append(Pin(element, Pin.OUT)) 249 250 # ----------------------------------------- 251 252 def init(self): 253 """Initializes the LCD for communication.""" 254 255 # clear values on data bus. 256 for index in range(4): 257 self.data_bus[index].value(0) 258 utime.sleep_ms(50) 259 260 # initialization sequence. 261 self.data_bus[0].value(1) 262 self.data_bus[1].value(1) 263 self.strobe() 264 utime.sleep_ms(10) 265 266 self.strobe() 267 utime.sleep_ms(10) 268 269 self.strobe() 270 utime.sleep_ms(10) 271 272 self.data_bus[0].value(0) 273 self.strobe() 274 utime.sleep_ms(5) 275 276 self.write(0x28, 0) 277 utime.sleep_ms(1) 278 279 self.write(0x08, 0) 280 utime.sleep_ms(1) 281 282 self.write(0x01, 0) 283 utime.sleep_ms(10) 284 285 self.write(0x06, 0) 286 utime.sleep_ms(5) 287 288 self.write(0x0C, 0) 289 utime.sleep_ms(10) 290 291 # ----------------------------------------- 292 293 def strobe(self): 294 """Flashes the enable line and provides wait period.""" 295 296 self.enable_pin.value(1) 297 utime.sleep_ms(1) 298 299 self.enable_pin.value(0) 300 utime.sleep_ms(1) 301 302 # ----------------------------------------- 303 304 def write(self, command, mode): 305 """Sends data to the LCD module. """ 306 307 # determine if writing a command or data 308 data = command if mode == 0 else ord(command) 309 310 # need upper nibble for first loop. lower nibble can use data directly. 311 upper = data >> 4 312 313 # write the upper nibble 314 for index in range(4): 315 bit = upper & 1 316 self.data_bus[index].value(bit) 317 upper = upper >> 1 318 319 # strobe the LCD, sending the nibble 320 self.reg_select_pin.value(mode) 321 self.strobe() 322 323 # write the lower nibble 324 for index in range(4): 325 bit = data & 1 326 self.data_bus[index].value(bit) 327 data = data >> 1 328 329 # Strobe the LCD, sending the nibble 330 self.reg_select_pin.value(mode) 331 self.strobe() 332 utime.sleep_ms(1) 333 self.reg_select_pin.value(1) 334 335 # ----------------------------------------- 336 337 def clear(self): 338 """Clear the LCD Screen.""" 339 340 self.write(0x01, 0) 341 utime.sleep_ms(5) 342 343 # ----------------------------------------- 344 345 def home(self): 346 """Return the Cursor to the starting position.""" 347 348 self.write(0x02, 0) 349 utime.sleep_ms(5) 350 351 # ----------------------------------------- 352 353 354 def blink(self): 355 """Have the cursor start blinking.""" 356 357 self.write(0x0D, 0) 358 utime.sleep_ms(1) 359 360 # ----------------------------------------- 361 362 def cursor_on(self): 363 """Have the cursor on, Good for debugging.""" 364 365 self.write(0x0E, 0) 366 utime.sleep_ms(1) 367 368 # ----------------------------------------- 369 370 def cursor_off(self): 371 """Turn the cursor off.""" 372 373 self.write(0x0C, 0) 374 utime.sleep_ms(1) 375 376 # ----------------------------------------- 377 378 def print(self, string): 379 """Write a string on to the LCD.""" 380 381 for element in string: 382 self._putch(element) 383 384 # ----------------------------------------- 385 386 def _putch(self, c): 387 """Write a character on to the LCD.""" 388 self.write(c, 1) 389 390 # ----------------------------------------- 391 392 def _puts(self, string): 393 """Write a string on to the LCD.""" 394 395 for element in string: 396 self._putch(element) 397 398 399 # ----------------------------------------- 400 def go_to(self, column, row): 401 402 403 if row == 0: 404 address = 0 405 406 if row == 1: 407 address = 0x40 408 409 if row == 2: 410 address = 0x14 411 412 if row == 3: 413 address = 0x54 414 415 address = address + column 416 self.write(0x80 | address, 0) 417 418 419# ----------------------------------------- 420# END OF FILE 421# -----------------------------------------
sdcard.py
1""" 2MicroPython driver for SD cards using SPI bus. 3 4Requires an SPI bus and a CS pin. Provides readblocks and writeblocks 5methods so the device can be mounted as a filesystem. 6 7Example usage on pyboard: 8 9 import pyb, sdcard, os 10 sd = sdcard.SDCard(pyb.SPI(1), pyb.Pin.board.X5) 11 pyb.mount(sd, '/sd2') 12 os.listdir('/') 13 14Example usage on ESP8266: 15 16 import machine, sdcard, os 17 sd = sdcard.SDCard(machine.SPI(1), machine.Pin(15)) 18 os.mount(sd, '/sd') 19 os.listdir('/') 20 21""" 22 23from micropython import const 24import time 25 26 27_CMD_TIMEOUT = const(100) 28 29_R1_IDLE_STATE = const(1 << 0) 30# R1_ERASE_RESET = const(1 << 1) 31_R1_ILLEGAL_COMMAND = const(1 << 2) 32# R1_COM_CRC_ERROR = const(1 << 3) 33# R1_ERASE_SEQUENCE_ERROR = const(1 << 4) 34# R1_ADDRESS_ERROR = const(1 << 5) 35# R1_PARAMETER_ERROR = const(1 << 6) 36_TOKEN_CMD25 = const(0xFC) 37_TOKEN_STOP_TRAN = const(0xFD) 38_TOKEN_DATA = const(0xFE) 39 40 41class SDCard: 42 def __init__(self, spi, cs): 43 self.spi = spi 44 self.cs = cs 45 46 self.cmdbuf = bytearray(6) 47 self.dummybuf = bytearray(512) 48 self.tokenbuf = bytearray(1) 49 for i in range(512): 50 self.dummybuf[i] = 0xFF 51 self.dummybuf_memoryview = memoryview(self.dummybuf) 52 53 # initialise the card 54 self.init_card() 55 56 def init_spi(self, baudrate): 57 try: 58 master = self.spi.MASTER 59 except AttributeError: 60 # on ESP8266 61 self.spi.init(baudrate=baudrate, phase=0, polarity=0) 62 else: 63 # on pyboard 64 self.spi.init(master, baudrate=baudrate, phase=0, polarity=0) 65 66 def init_card(self): 67 # init CS pin 68 self.cs.init(self.cs.OUT, value=1) 69 70 # init SPI bus; use low data rate for initialisation 71 self.init_spi(100000) 72 73 # clock card at least 100 cycles with cs high 74 for i in range(16): 75 self.spi.write(b"\xff") 76 77 # CMD0: init card; should return _R1_IDLE_STATE (allow 5 attempts) 78 for _ in range(5): 79 if self.cmd(0, 0, 0x95) == _R1_IDLE_STATE: 80 break 81 else: 82 raise OSError("no SD card") 83 84 # CMD8: determine card version 85 r = self.cmd(8, 0x01AA, 0x87, 4) 86 if r == _R1_IDLE_STATE: 87 self.init_card_v2() 88 elif r == (_R1_IDLE_STATE | _R1_ILLEGAL_COMMAND): 89 self.init_card_v1() 90 else: 91 raise OSError("couldn't determine SD card version") 92 93 # get the number of sectors 94 # CMD9: response R2 (R1 byte + 16-byte block read) 95 if self.cmd(9, 0, 0, 0, False) != 0: 96 raise OSError("no response from SD card") 97 csd = bytearray(16) 98 self.readinto(csd) 99 if csd[0] & 0xC0 == 0x40: # CSD version 2.0 100 self.sectors = ((csd[8] << 8 | csd[9]) + 1) * 1024 101 elif csd[0] & 0xC0 == 0x00: # CSD version 1.0 (old, <=2GB) 102 c_size = csd[6] & 0b11 | csd[7] << 2 | (csd[8] & 0b11000000) << 4 103 c_size_mult = ((csd[9] & 0b11) << 1) | csd[10] >> 7 104 self.sectors = (c_size + 1) * (2 ** (c_size_mult + 2)) 105 else: 106 raise OSError("SD card CSD format not supported") 107 # print('sectors', self.sectors) 108 109 # CMD16: set block length to 512 bytes 110 if self.cmd(16, 512, 0) != 0: 111 raise OSError("can't set 512 block size") 112 113 # set to high data rate now that it's initialised 114 self.init_spi(1320000) 115 116 def init_card_v1(self): 117 for i in range(_CMD_TIMEOUT): 118 self.cmd(55, 0, 0) 119 if self.cmd(41, 0, 0) == 0: 120 self.cdv = 512 121 # print("[SDCard] v1 card") 122 return 123 raise OSError("timeout waiting for v1 card") 124 125 def init_card_v2(self): 126 for i in range(_CMD_TIMEOUT): 127 time.sleep_ms(50) 128 self.cmd(58, 0, 0, 4) 129 self.cmd(55, 0, 0) 130 if self.cmd(41, 0x40000000, 0) == 0: 131 self.cmd(58, 0, 0, 4) 132 self.cdv = 1 133 # print("[SDCard] v2 card") 134 return 135 raise OSError("timeout waiting for v2 card") 136 137 def cmd(self, cmd, arg, crc, final=0, release=True, skip1=False): 138 self.cs(0) 139 140 # create and send the command 141 buf = self.cmdbuf 142 buf[0] = 0x40 | cmd 143 buf[1] = arg >> 24 144 buf[2] = arg >> 16 145 buf[3] = arg >> 8 146 buf[4] = arg 147 buf[5] = crc 148 self.spi.write(buf) 149 150 if skip1: 151 self.spi.readinto(self.tokenbuf, 0xFF) 152 153 # wait for the response (response[7] == 0) 154 for i in range(_CMD_TIMEOUT): 155 self.spi.readinto(self.tokenbuf, 0xFF) 156 response = self.tokenbuf[0] 157 if not (response & 0x80): 158 # this could be a big-endian integer that we are getting here 159 for j in range(final): 160 self.spi.write(b"\xff") 161 if release: 162 self.cs(1) 163 self.spi.write(b"\xff") 164 return response 165 166 # timeout 167 self.cs(1) 168 self.spi.write(b"\xff") 169 return -1 170 171 def readinto(self, buf): 172 self.cs(0) 173 174 # read until start byte (0xff) 175 for i in range(_CMD_TIMEOUT): 176 self.spi.readinto(self.tokenbuf, 0xFF) 177 if self.tokenbuf[0] == _TOKEN_DATA: 178 break 179 else: 180 self.cs(1) 181 raise OSError("timeout waiting for response") 182 183 # read data 184 mv = self.dummybuf_memoryview 185 if len(buf) != len(mv): 186 mv = mv[: len(buf)] 187 self.spi.write_readinto(mv, buf) 188 189 # read checksum 190 self.spi.write(b"\xff") 191 self.spi.write(b"\xff") 192 193 self.cs(1) 194 self.spi.write(b"\xff") 195 196 def write(self, token, buf): 197 self.cs(0) 198 199 # send: start of block, data, checksum 200 self.spi.read(1, token) 201 self.spi.write(buf) 202 self.spi.write(b"\xff") 203 self.spi.write(b"\xff") 204 205 # check the response 206 if (self.spi.read(1, 0xFF)[0] & 0x1F) != 0x05: 207 self.cs(1) 208 self.spi.write(b"\xff") 209 return 210 211 # wait for write to finish 212 while self.spi.read(1, 0xFF)[0] == 0: 213 pass 214 215 self.cs(1) 216 self.spi.write(b"\xff") 217 218 def write_token(self, token): 219 self.cs(0) 220 self.spi.read(1, token) 221 self.spi.write(b"\xff") 222 # wait for write to finish 223 while self.spi.read(1, 0xFF)[0] == 0x00: 224 pass 225 226 self.cs(1) 227 self.spi.write(b"\xff") 228 229 def readblocks(self, block_num, buf): 230 nblocks = len(buf) // 512 231 assert nblocks and not len(buf) % 512, "Buffer length is invalid" 232 if nblocks == 1: 233 # CMD17: set read address for single block 234 if self.cmd(17, block_num * self.cdv, 0, release=False) != 0: 235 # release the card 236 self.cs(1) 237 raise OSError(5) # EIO 238 # receive the data and release card 239 self.readinto(buf) 240 else: 241 # CMD18: set read address for multiple blocks 242 if self.cmd(18, block_num * self.cdv, 0, release=False) != 0: 243 # release the card 244 self.cs(1) 245 raise OSError(5) # EIO 246 offset = 0 247 mv = memoryview(buf) 248 while nblocks: 249 # receive the data and release card 250 self.readinto(mv[offset : offset + 512]) 251 offset += 512 252 nblocks -= 1 253 if self.cmd(12, 0, 0xFF, skip1=True): 254 raise OSError(5) # EIO 255 256 def writeblocks(self, block_num, buf): 257 nblocks, err = divmod(len(buf), 512) 258 assert nblocks and not err, "Buffer length is invalid" 259 if nblocks == 1: 260 # CMD24: set write address for single block 261 if self.cmd(24, block_num * self.cdv, 0) != 0: 262 raise OSError(5) # EIO 263 264 # send the data 265 self.write(_TOKEN_DATA, buf) 266 else: 267 # CMD25: set write address for first block 268 if self.cmd(25, block_num * self.cdv, 0) != 0: 269 raise OSError(5) # EIO 270 # send the data 271 offset = 0 272 mv = memoryview(buf) 273 while nblocks: 274 self.write(_TOKEN_CMD25, mv[offset : offset + 512]) 275 offset += 512 276 nblocks -= 1 277 self.write_token(_TOKEN_STOP_TRAN) 278 279 def ioctl(self, op, arg): 280 if op == 4: # get number of blocks 281 return self.sectors
test.py
1# ----------------------------------------- 2# NOTES 3# ----------------------------------------- 4""" 5Dieter Steinhauser 612/2022 7PicoPAD Test Script 8 9""" 10 11# ----------------------------------------- 12# IMPORTS 13# ----------------------------------------- 14 15from LCD import LCD 16# import _thread 17from utime import sleep, sleep_ms, sleep_us, ticks_ms 18from machine import Pin, Timer, ADC, freq 19# import gc 20 21# ----------------------------------------- 22# CONSTANTS/VARIABLES 23# ----------------------------------------- 24 25# ------------------ 26REFRESH_RATE = 10 # Frequency in Hz 27REFRESH_PERIOD = int((1 / REFRESH_RATE) * 1000) # delay in milliseconds 28 29# ------------------ 30UPY_BIT_RES = 16 31ADC_REF = 3.3 32VOLT_PER_BIT = ADC_REF / (2**UPY_BIT_RES) # ADC recieves in 2 byte packets and micropython automagically fixes it. 33 34# ------------------ 35DAC_REF = 5.0 36DC_OFFSET = 0 37DC_OFFSET_RES = int((DC_OFFSET / DAC_REF) * (2**UPY_BIT_RES)) 38 39# ------------------ 40FREQ_MAX = 160 41FREQ_MIN = 10 42AMP_MAX = DAC_REF 43AMP_MIN = 0 44 45MAX_DIST_US0 = 50 46MAX_DIST_US1 = 20 47 48 49# ------------------------------------------------------------- 50# INITIALIZATION 51# ------------------------------------------------------------- 52 53# ----------------------------------------- 54# SYSTEM CLOCK 55# ----------------------------------------- 56 57DEFAULT_SYS_CLK = 125_000_000 58STABLE_OVERCLOCK = 270_000_000 59 60# Pico can go up to 270MHz before needing to flash to the eeprom directly. 61system_clock = DEFAULT_SYS_CLK 62 63# if the system clock is not the default, apply the clock speed. 64if system_clock != DEFAULT_SYS_CLK: 65 freq(system_clock) 66 67# print(f'Clock: {freq()/1e6}MHz') 68 69# ----------------------------------------- 70# PINOUT 71# ----------------------------------------- 72 73# LCD Pins handled in LCD.py 74# ---------------------------- 75# EN = Pin(0, Pin.OUT) 76# RS = Pin(1, Pin.OUT) 77# D7 = Pin(2, Pin.OUT) 78# D6 = Pin(3, Pin.OUT) 79# D5 = Pin(4, Pin.OUT) 80# D4 = Pin(5, Pin.OUT) 81 82# Ultrasonic sensor pins handled in sensors.py 83# ---------------------------- 84# us0_trig = Pin(6, Pin.OUT) 85# us0_echo = Pin(7, Pin.IN) 86# us1_trig = Pin(8, Pin.OUT) 87# us1_echo = Pin(9, Pin.IN) 88 89# Switches 90# ---------------------------- 91# sw0 = Pin(10, Pin.IN, Pin.PULL_DOWN) 92# sw1 = Pin(11, Pin.IN, Pin.PULL_DOWN) 93# sw2 = Pin(12, Pin.IN, Pin.PULL_DOWN) 94# sw3 = Pin(13, Pin.IN, Pin.PULL_DOWN) 95# switch_pins = [sw0, sw1, sw2, sw3] 96 97# LEDs 98# ---------------------------- 99# led0 = Pin(14, Pin.OUT) 100# led1 = Pin(15, Pin.OUT) 101led_onboard = Pin(25, Pin.OUT) 102# led_pins = [led0, led1, led_onboard] 103 104# SPI handled by the Hardware in spi_config.py 105# ---------------------------- 106# miso = Pin(16, Pin.IN) 107# cs = Pin(17, Pin.OUT, value=1) 108# mosi = Pin(18, Pin.OUT) 109# sck = Pin(19, Pin.OUT) 110 111# Buttons 112# ---------------------------- 113# button0 = Pin(20, Pin.IN) 114# button1 = Pin(21, Pin.IN) 115# button2 = Pin(22, Pin.IN) 116# button3 = Pin(28, Pin.IN) 117# button_pins = [button0, button1, button2, button3] 118 119# ADC 120# ---------------------------- 121# adc0 = ADC(26) # Connect to GP26, which is channel 0 122# adc1 = ADC(27) # Connect to GP27, which is channel 1 123 124# ----------------------------------------- 125# LCD 126# ----------------------------------------- 127lcd = LCD(enable_pin=0, 128 reg_select_pin=1, 129 data_pins=[2, 3, 4, 5] 130 ) 131 132lcd.init() 133lcd.clear() 134# lcd.cursor_on() 135# lcd.blink() 136# ----------------------------------------- 137# ADC 138# ----------------------------------------- 139adc0 = ADC(26) # Connect to GP26, which is channel 0 140adc1 = ADC(27) # Connect to GP27, which is channel 1 141# adc2 = machine.ADC(28) # Connect to GP28, which is channel 2 142# adc_reading = adc0.read_u16() * VOLT_PER_BIT # read and report the ADC reading 143 144# ----------------------------------------- 145# SD CARD VIA SPI 146# ----------------------------------------- 147# 148# import sdcard 149# import os 150# import uos 151# 152# # Assign chip select (CS) pin (and start it high) 153# cs = Pin(20, machine.Pin.OUT) 154# 155# # Intialize SPI peripheral (start with 1 MHz) 156# spi = machine.SPI(0, 157# baudrate=1000000, 158# polarity=0, 159# phase=0, 160# bits=8, 161# firstbit=machine.SPI.MSB, 162# sck=Pin(18), 163# mosi=Pin(19), 164# miso=Pin(16)) 165# 166# # Initialize SD card 167# sd = sdcard.SDCard(spi, cs) 168# 169# vfs = uos.VfsFat(sd) 170# uos.mount(vfs, "/sd") 171# 172# # Create a file and write something to it 173# file = open("/sd/test01.txt", "w") 174# 175# with open("/sd/test01.txt", "w") as file: 176# file.write("Hello, SD World!\r\n") 177# file.write("This is a test\r\n") 178# 179# # Open the file we just created and read from it 180# with open("/sd/test01.txt", "r") as file: 181# data = file.read() 182# print(data) 183 184# ----------------------------------------- 185# PROCESS 1: IO 186# ----------------------------------------- 187 188while True: 189 190 splash = True 191 # Display the splash screen on startup. 192 if splash is True: 193 led_onboard(1) 194 lcd.print(f'PicoPAD Test ') 195 lcd.go_to(0,1) 196 lcd.print(f'Dieter S. ') 197 sleep(2) 198 lcd.home() 199 lcd.clear() 200 lcd.print(f'System Clock') 201 lcd.go_to(0,1) 202 lcd.print(f'{freq()/1e6}MHz') 203 sleep(2) 204 lcd.home() 205 lcd.clear() 206 led_onboard.toggle() 207 208 while True: 209 210 # read ADC 211 # ----------------------------------------- 212 adc0_reading = (adc0.read_u16() * VOLT_PER_BIT) 213 adc1_reading = (adc1.read_u16() * VOLT_PER_BIT) 214 lcd.home() 215 lcd.print(f'ADC0: {round(adc0_reading,3)} ') 216 lcd.go_to(0,1) 217 lcd.print(f'ADC1: {round(adc1_reading,3)} ') 218 219 # toggle onboard LED for System speed status and refresh delay 220 # ----------------------------------------- 221 led_onboard.toggle() 222 sleep_ms(REFRESH_PERIOD) 223 # gc.collect() 224 225 226 227
References
- 2
“What is a bypass capacitor? tutorial: Applications,” Electronics Hub, 14-Sep-2021. [Online]. Available: https://www.electronicshub.org/bypass-capacitor-tutorial/. [Accessed: 27-Aug-2022].
- 10
“Ltc1661 – micropower dual 10-bit DAC in MSOP - Analog Devices.” [Online]. Available: https://www.analog.com/media/en/technical-documentation/data-sheets/1661fb.pdf. [Accessed: 17-Oct-2022].
- 13(1,2,3,4)
“Raspberry Pico Datasheet,” raspberrypi.com. [Online]. Available: https://datasheets.raspberrypi.com/pico/pico-datasheet.pdf. [Accessed: 15-Nov-2022].
- 14(1,2)
“Raspberry Pico python SDK,” raspberrypi.com. [Online]. Available: https://datasheets.raspberrypi.com/pico/raspberry-pi-pico-python-sdk.pdf. [Accessed: 15- Nov-2022].
- 15
“RP2040 Datasheet,” raspberrypi.com. [Online]. Available: https://datasheets.raspberrypi.com/rp2040/rp2040-datasheet.pdf. [Accessed: 14-Nov-2022].
- 16
“Serial peripheral interface,” Wikipedia, 27-Sep-2022. [Online]. Available: https://en.wikipedia.org/wiki/Serial_Peripheral_Interface. [Accessed: 19-Oct-2022].
- 17
“Sitronix ST7066U - Crystalfontz,” crystalfontz. [Online]. Available: https://www.crystalfontz.com/controllers/Sitronix/ST7066U/438. [Accessed: 03-Oct2022].
- 18
“What is a Bypass Capacitor?,” What is a bypass capacitor? [Online]. Available: http://www.learningaboutelectronics.com/Articles/What-is-a-bypass-capacitor.html. [Accessed: 27-Aug-2022].